High Voltage & Modular
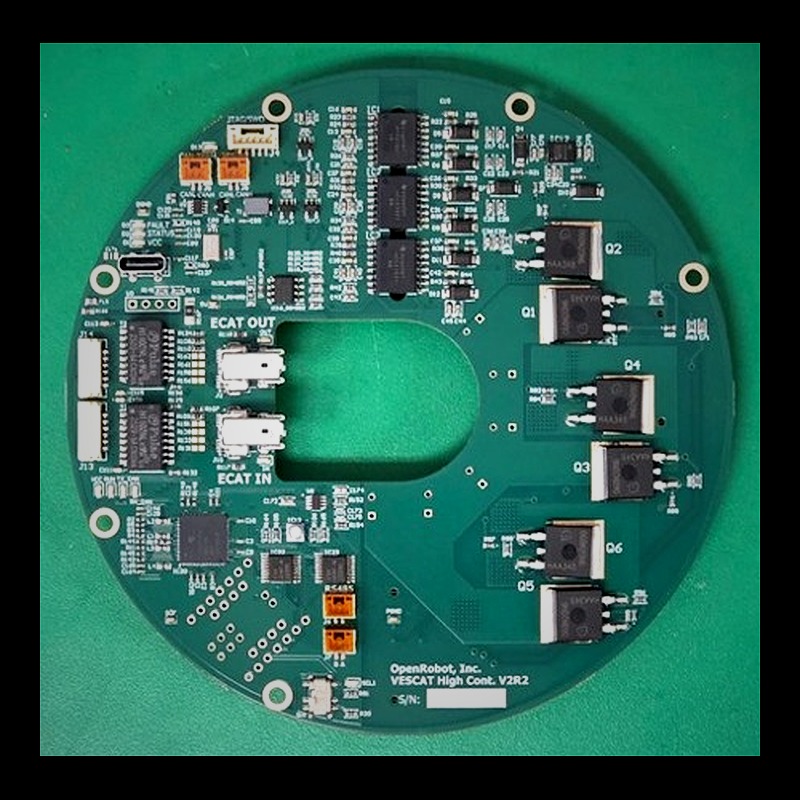
VESCAT HighVolt
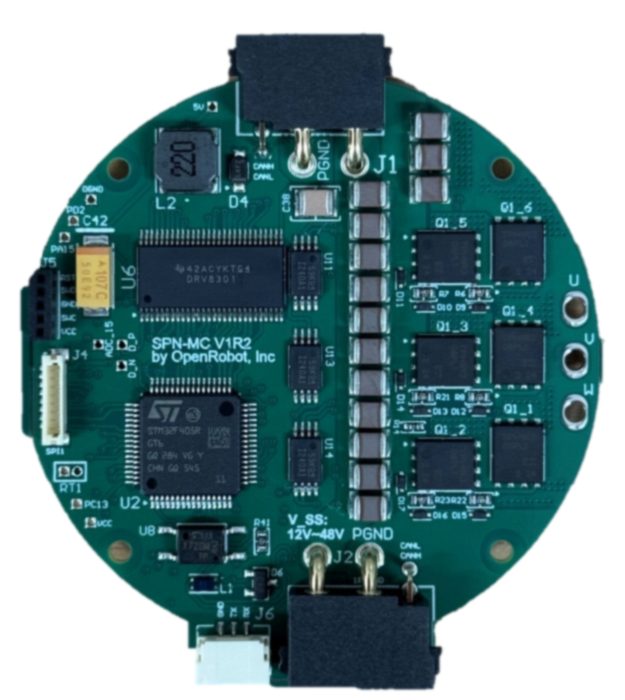
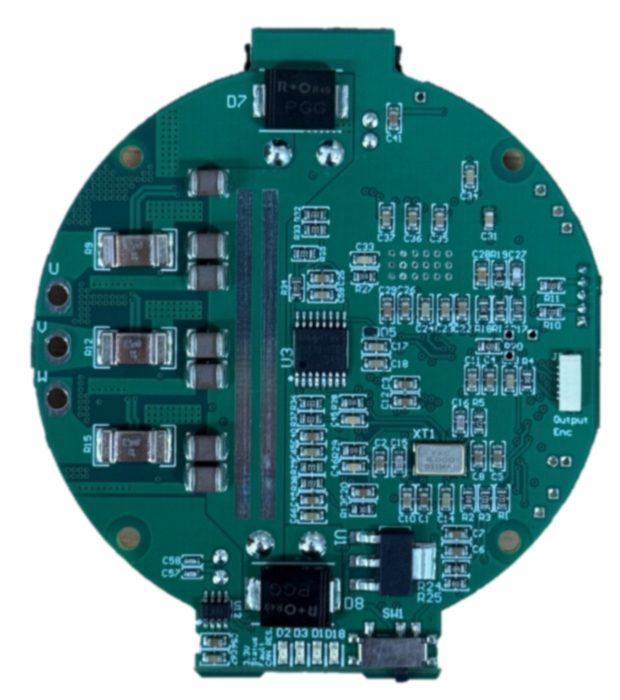
Stacked modular architecture — Power Board + Controller Board
VESCAT HighVolt is a high-efficiency modular motor controller designed for high-voltage actuator systems. By operating at high voltage, it significantly reduces current draw and heat generation while achieving superior efficiency — enabling compact, thermally stable designs for demanding applications. Its two-layer stacked architecture separates the Power Board and Controller Board for maximum scalability, and built-in EtherCAT support enables real-time, high-speed communication for multi-axis industrial and robotic systems.
160 VDC
Rated Voltage (200 VDC max)
1kW
Peak Power
SPI Encoder
e.g. RLS AksIM-2
CAN / EtherCAT
Communication Interfaces
- High-voltage drive — lower current, less heat, higher efficiency
- EtherCAT real-time communication for multi-axis control
- 2-layer stacked design (Power Board + Controller Board)
- PCB conformal coating for moisture resistance
- CAN bus communication support